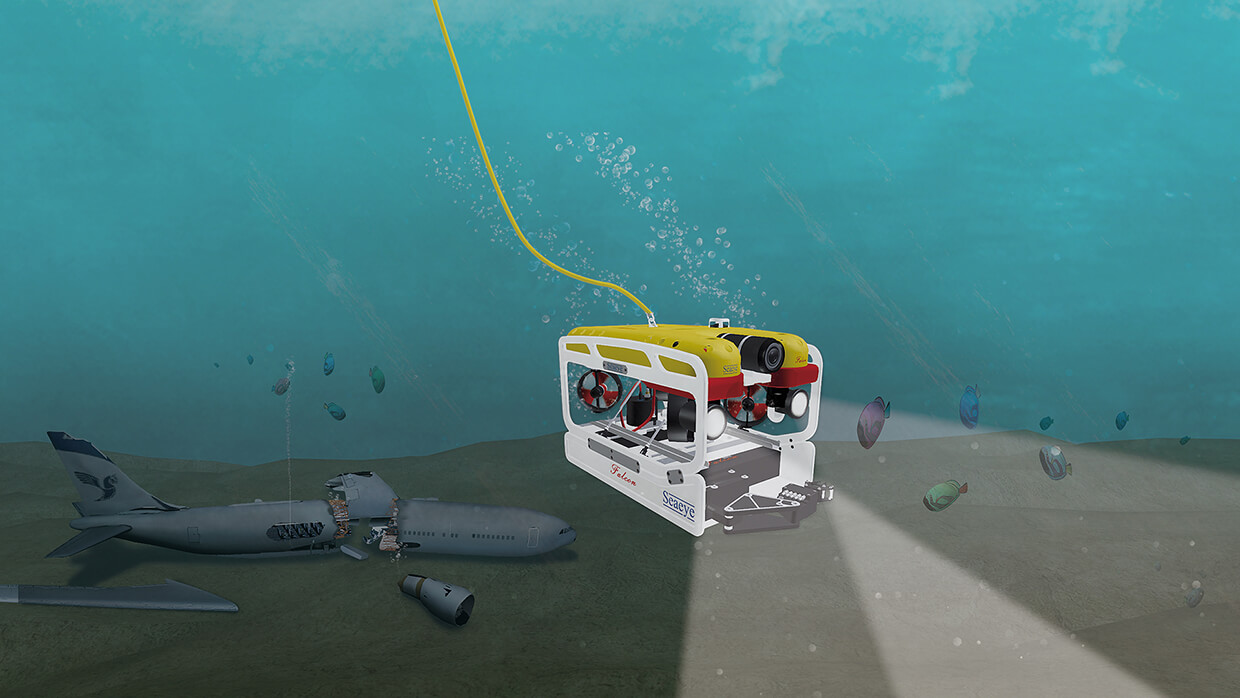
Underwater Simulation
Diving robots, so-called remotely operated vehicles (ROVs), are used for underwater exploration and remote handling. In order to be able to practice the operation under realistic conditions, SZENARIS has developed a virtual reality simulator for the two diving robots GNOM and Seaeye Falcon. In this virtual reality simulator, the realistic 3D models can be moved freely in a virtual underwater environment. Objects such as rocks, pipelines, ship hulls and aircraft wrecks provide different demanding mission scenarios.